
 产品:14
产品:14
 联系我们
联系我们

出厂前大小臂的角度传感器已经经过校准,如需从新校准,可按以下步骤进行:

STEP 1: 拆下角度传感器
用内六角扳手拆下大小臂的角度传感器并水平放置在桌面上;

角度传感器
STEP 2: 连接DobotTerminal
将Dobot连接上PC,然后打开DobotTools文件夹下的DobotTerminal,设置好波特率9600(如果是V1.0的固件,波特率为256000),即可成功连接DobotTerminal。
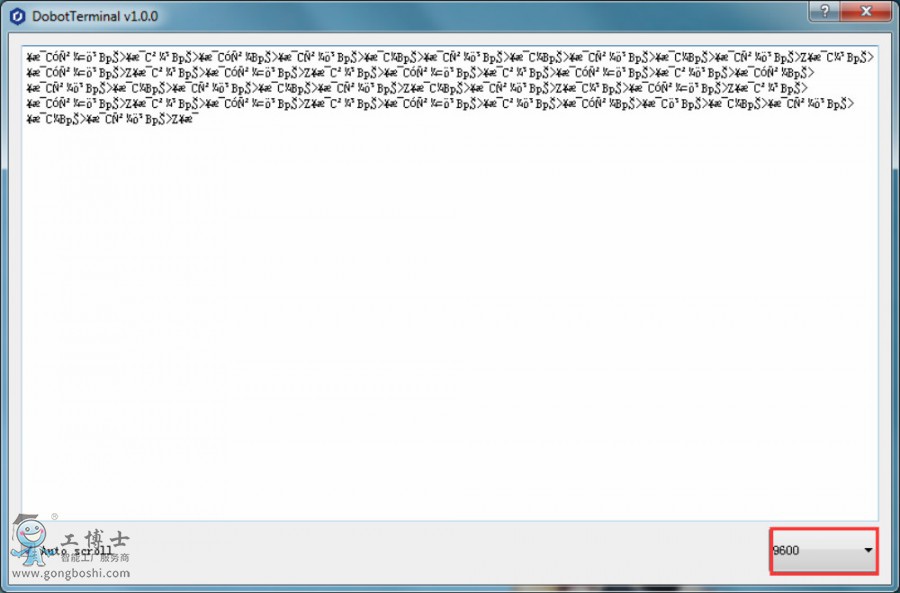
波特率设置
STEP 3: 进入校准模式
首先按住控制盒上的Sensor Calibration按键不放(离USB接口更远的按键),然后按Reset按键重启控制板,继续按住Sensor Calibration按键保持约2秒钟后再松开,此时提示进入校准流程“Start calibrating”。

操作流程
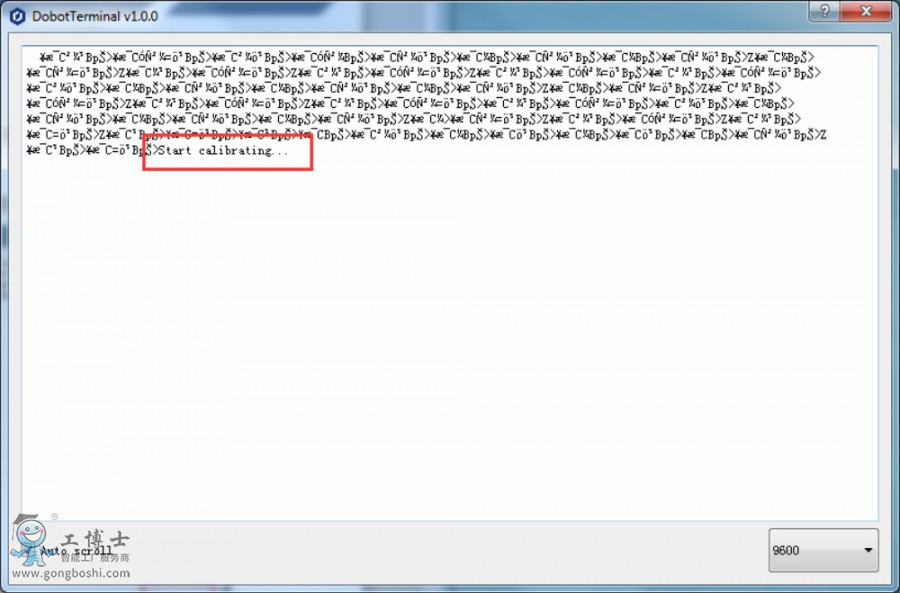
进入校准模式
STEP 4: 开始校准
1.将大臂和小臂的传感器放平保持与水平面0度角;
2.按一下Sensor Calibration按键(即校正大臂的角度传感器),此时串口会提示校准补偿“Long arm anlge”和测量误差“Long arm angle new”,如校准补偿成功和误差正常,会提示校准成功.
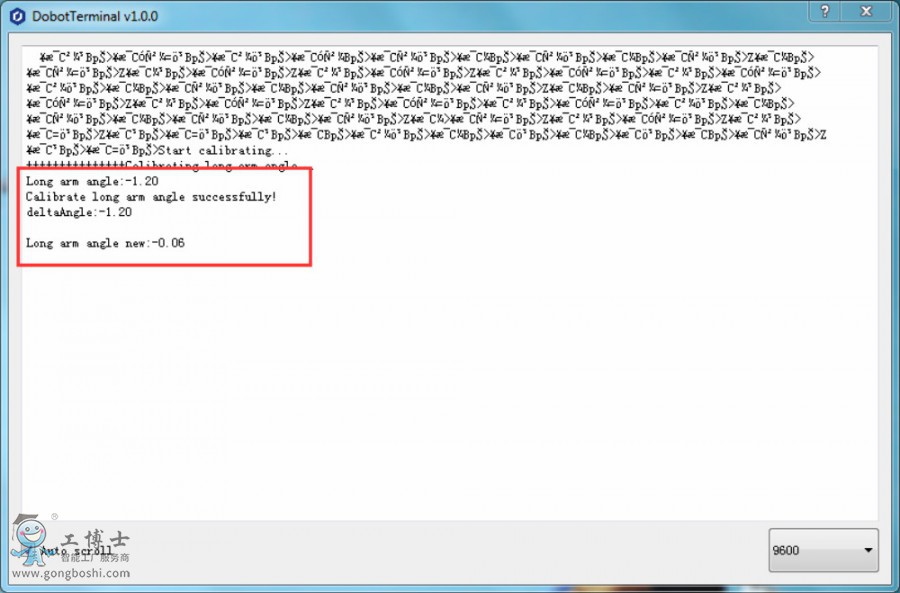
大臂校准信息
3. 再按一下Sensor Calibration按键(即校正小臂的角度传感器),此时串口会提示校准补偿Short arm anlge和测量误差Short arm angle new,如校准补偿成功和误差正常,会提示校准成功。
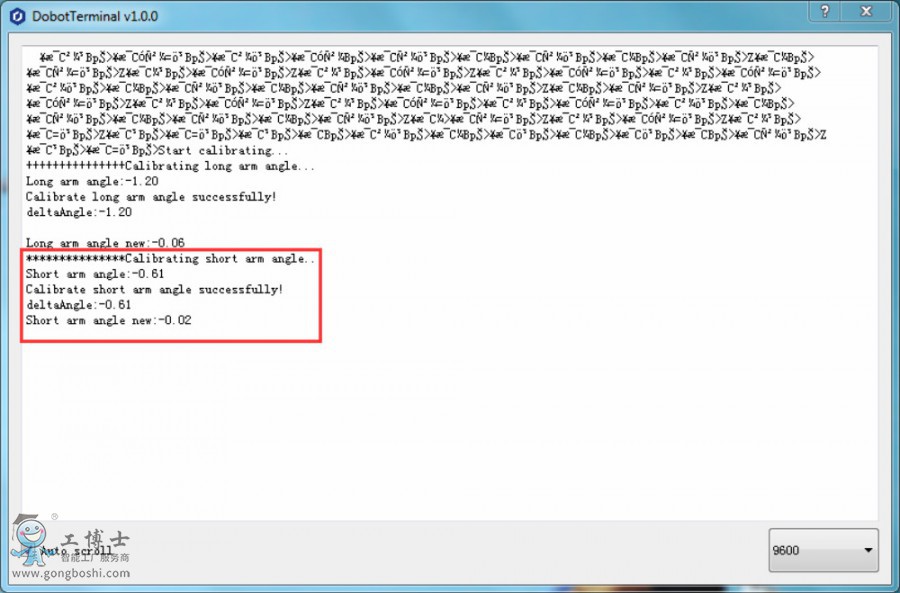
小臂校准信息
4. 如出现提示“failed, need to be re-calibrated”,请确保sensor放置水平并重新进行步骤3-5;
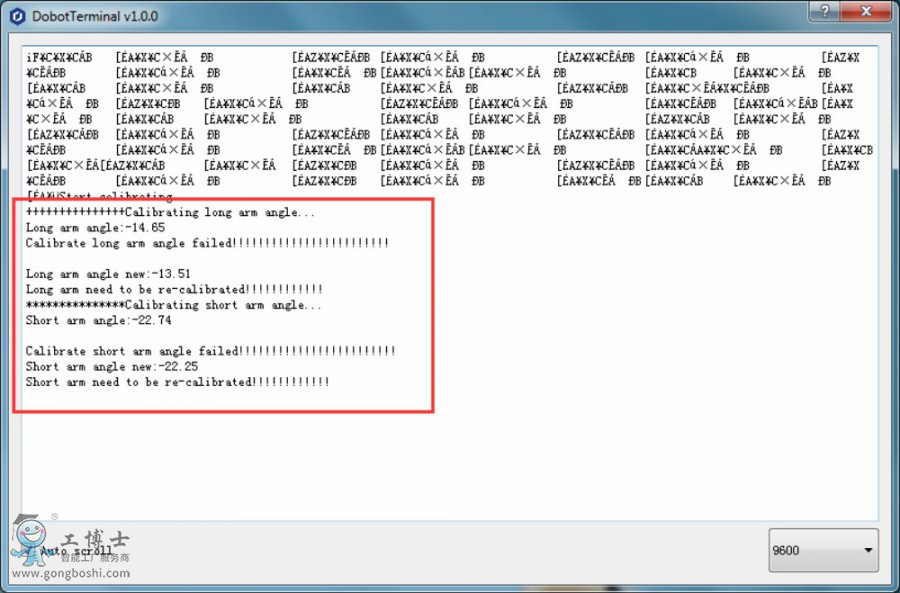
校准错误信息
5. 校正完毕,重启电路板即可。
注意事项:
按键时间一定要充足(约2s) ,以确保按键动作被检测到。
校准信息不会丢失,会保存在EEPROM中并在下次测量中生效。
- 下一篇:越疆科技助力3C智造变革,让生产线游刃有余
- 上一篇:越疆科技发布K12教育机械臂